咨詢電話
13924666952
400-158-1606


關節式工業機器人控制系統為華成標準系列系統,HC-S6/S8。為了使機械手能夠正確地自動運行,每次打開電源后,在停止狀態下進行原點復歸動作。原點復歸動作將驅動機械手每個軸復歸到原點位置。
工業機器人在生產運行中原點復歸方式如下:
狀況1:未設置過原點的操作流程
1、在手動狀態下把所有軸精確移動至原點位置。
2、保存原點位置:停止狀態下進入【參數設定】→【機械設定】→【電機參數】頁面點擊【設為原點】或者【全部設為原點】按鈕,最后再點擊【保存原點】按鈕即可。

狀況2:已經設置過原點的操作流程
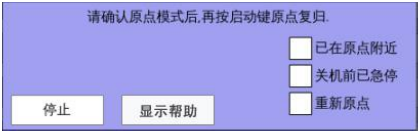
在停止狀態下按【原點】鍵,出現如下圖所示的選擇對話框,根據實際情況勾選選項,(如對選項不理解請點【顯示幫助】按鈕具體了解)再按【啟動】鍵則機械手開始進行原點復歸動作。
【顯示幫助】詳情內容
□ 已在原點附近:位置大概在附近時時使用。
□ 關機前已急停:只有確定關機前已經拍下急停了才能使用。
□ 重新歸原點:已在原點附近沒歸到位的時候,再次歸原點點時候使用。
提示:原點復歸時,用戶不可以對機械手進行手動、自動操作和參數設定,遇到緊急情況可按【停止】鍵停止原點復歸或按下【急停按鈕】。
版權所有 ? 深圳市華成工業控制股份有限公司 未經許可不得復制、轉載或摘編,違者必究 版權聲明
Copyright ? Shenzhen Huacheng Industrial Control Co., Ltd. All Rights Reserved.
網站ICP備案號: 粵ICP備19106162號
技術支持:新新網絡

